

热门软件
大小:1.36GB
提现:0元起
Android
浏览:次
下载:19758次
开发者:
2024-10-15 10:20

太空机器人起源于20世纪60年代,随着人类对太空探索的深入,太空机器人逐渐成为太空任务的重要组成部分。以下是太空机器人发展历程的简要回顾:
1960年代:美国和苏联开始研制太空机器人,主要用于月球和火星探测任务。
1970年代:美国成功发射了阿波罗登月计划,太空机器人开始在月球表面进行探测和采集样本。
1980年代:苏联的火星探测器“火星-96”携带了太空机器人,但由于故障未能成功着陆。
1990年代:美国成功发射了火星探测器“火星探路者”和“火星漫游者”,太空机器人开始在火星表面进行探测。
21世纪初:我国成功发射了月球探测器“嫦娥一号”,太空机器人开始在月球表面进行探测。

太空机器人具有多种应用领域,以下列举几个主要方面:
月球和火星探测:太空机器人可以携带各种科学仪器,对月球和火星表面进行探测,为人类提供宝贵的数据。
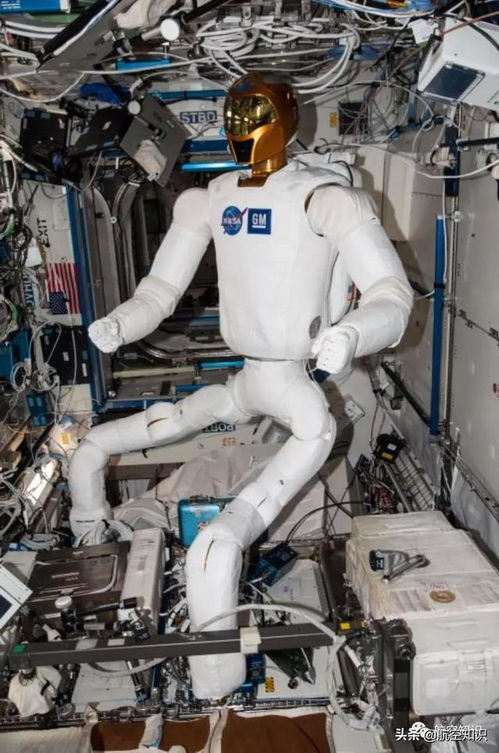
空间站维护:太空机器人可以帮助宇航员进行空间站维护工作,提高工作效率。
太空垃圾清理:太空机器人可以清理太空垃圾,减少太空环境对航天器的威胁。
太空资源开发:太空机器人可以帮助人类开发太空资源,如月球和火星的矿产资源。

太空机器人具有以下技术特点:
自主导航:太空机器人可以自主导航,完成复杂的探测任务。
环境适应能力:太空机器人可以适应极端的太空环境,如高温、低温、辐射等。
远程操控:太空机器人可以通过地面控制中心进行远程操控,实现远程作业。
智能交互:太空机器人具有智能交互功能,可以与宇航员进行对话,提供任务指导。

更加智能:未来太空机器人将具备更高的智能水平,能够完成更加复杂的任务。
更加小型化:随着技术的进步,太空机器人将更加小型化,便于携带和部署。
更加多样化:未来太空机器人将具备更多样化的功能,满足不同领域的需求。
更加协同作业:太空机器人将与其他航天器协同作业,提高太空任务效率。




























